研究了冲压机械手的模块化技术,解决了五金及金属制品行业冲压过程中生产效率低、劳动强度高、安全风险大的问题,重点解决了五金及金属制品行业冲压过程中手工作业生产效率低、劳动强度高、安全风险大等问题。本项目将采用光学机电一体化技术、模块化研究技术、快速连接技术、谐波技术等技术,提高机械手的灵活性,简化安装和维护,降低成本,提高工件的传递速度。
1 机械手工作流程及结构分析
1.1 工作流程分析
通过分析研究各种冲床的上下料模式及运行要求,采用模块化设计技术、协调作业技术,完成冲压机械手的工作流程化分析,如图1所示。

图1 冲压机械手的工作流程图
1.2 结构分析
根据冲压机械手的功能划分和需求分析,为了满足产品的功能和性能,提高整个模块化系统的灵活性,冲压机械手可分为图2、绘图模块1抓取工件,并通过推送模块2、旋转模块3和提升模块4将工件送到指定位置,由此可以看出冲压机械手主要由进给模块、推送模块、旋转模块和提升模块组成。
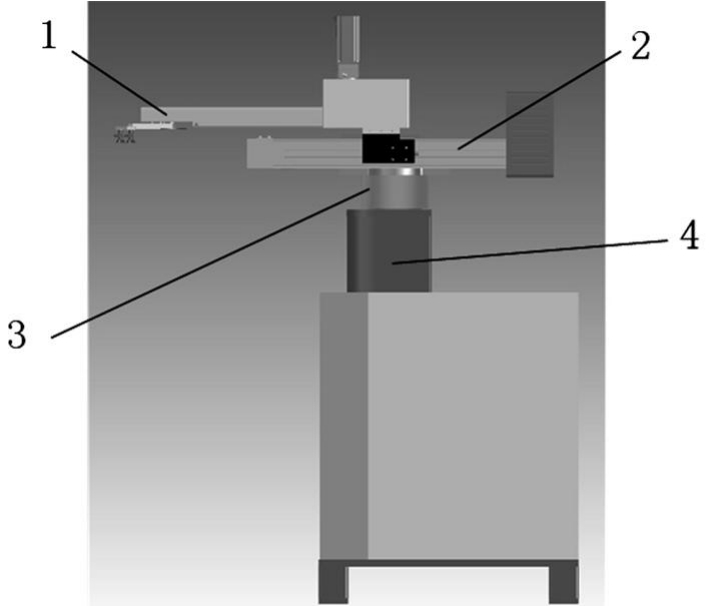
图2 冲压机械手模块组成
1.取料模块 2.推送模块 3.旋转模块 4.升降模块
取料模块:根据产品特点要求,整合各种取放料技术,如真空吸盘、机械爪、电磁吸盘等,其取料的重量从数克到数千克不等;
推送模块:在冲压机械手完成取料动作后,执行直线运动的作用,与旋转模块、升降模块配合,实现避开障碍,按照一定路线运动的功能;
旋转模块:旋转模块主要实现将工件及推送模块一同绕一定的中心进行旋转的运动;
升降模块:升降模块是将以上3个模块同时升降动作。
这四个模块的组合满足了现有大多数冲床的需要,并根据实际使用,主要是在更换生产工件的末端来取代进给模块的末端,因此如何快速更换不同的进给模块,缩短设备的调试时间是主要的研究重点。为此,进行了快速连接夹具模块和物料采集模块的设计与应用。
2 快接夹具模块的设计与应用
根据冲压机械手模块化的要求,研究开发了采用真空吸技术的快速组合夹具模块,它可以同时满足气路与电路的连接要求。同时可以快速定位夹紧,从而实现了机械手末端取料模块的快速装夹,大大提高了取料模块的更换时间,降低了生产成本。
模块拼接是这一设计的一个重要和独特的部分。该夹具主要由两部分组成,分为两部分:男性头和母头,机械手端固定安装头,取料夹具的另一端安装主头部分,并将相应的头与母头牢固地锁在一起,实现快速更换的功能。因此,可以将一种快速夹具头与多个母头连接起来,有效地提高了生产工件冲头更换的效率,缩短了调试时间。
快接夹具设计为方形的结构,由耐磨金属板材通过精密加工成型,设计图如图3所示。夹具公头中间设计有圆柱造型2与母头的通孔4相配合,并与导柱11和导套6配合完成公头和母头快接夹具的定位,气管接口3通过通断气来实现公头与母头夹具的锁紧与松开。接头10与空轴9为相通设计,配合接头8与孔7实现气路的贯通。连接器1与5配合实现电路之间的连接。因此这种设计的快接夹具可以有效实现气路与电路的连接,缩短取料模块夹具的更换时间,提高工作效率。
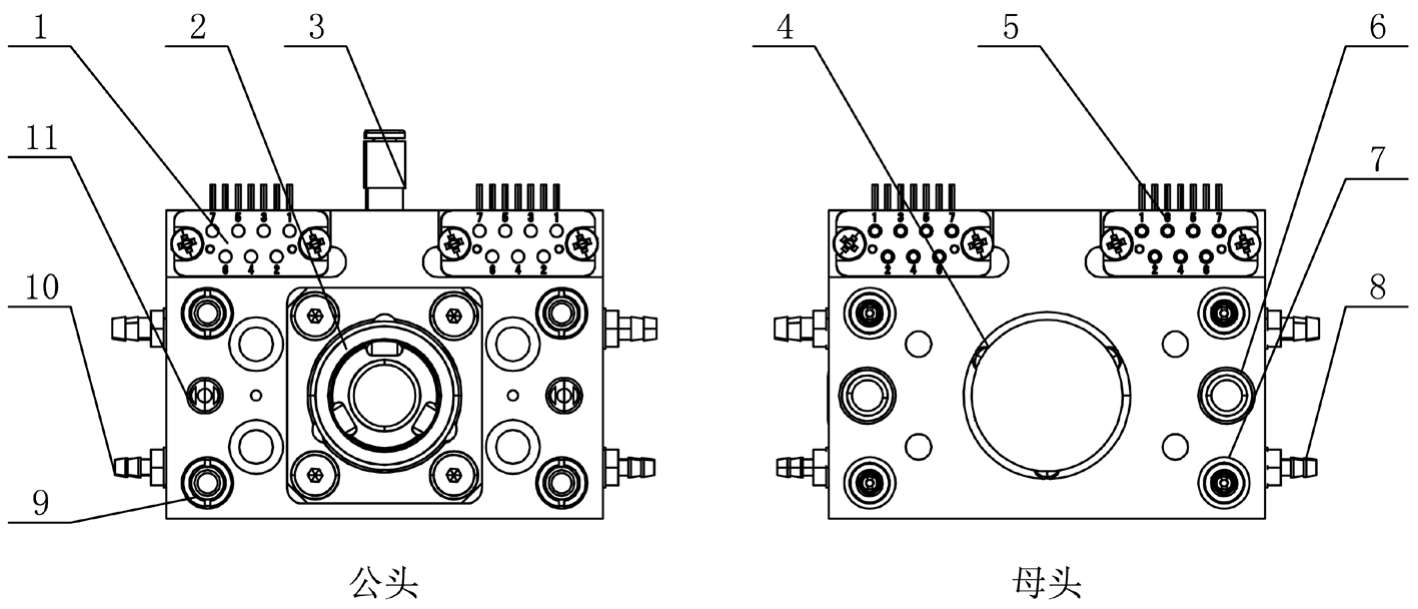
图3 快接夹具模块设计图
1.连接器 2.圆柱 3.气管接口 4.通孔 5.连接器 6.导套 7.孔 8.接头 9.空轴 10.接头 11.导柱
3 冲压机械手的末端取料模块的设计与应用
经过对冲压机械手的模块化分解,需要根据具体的设计要求选择合适的功能模块,需要考虑的因素有负载、尺寸大小、精度、速度等,其中取料模块的选择,可根据工件产品的形状特点,取料模块可采用真空吸盘、机械爪、电磁吸盘等不同的形式模块。
3.1 真空吸盘的选择
真空吸盘,首先,真空吸盘通过喷嘴连接到真空设备上,然后与工件表面接触,启动真空设备吸收,从而产生吸盘内的负压,使工件被牢固地吸出,然后工件才能移动。当工件移动到目的地时,真空吸盘被平滑地充气到真空吸盘中,使真空吸盘从负压变为零压力或微正气压,真空吸盘与工件分离,从而完成提升和输送任务。
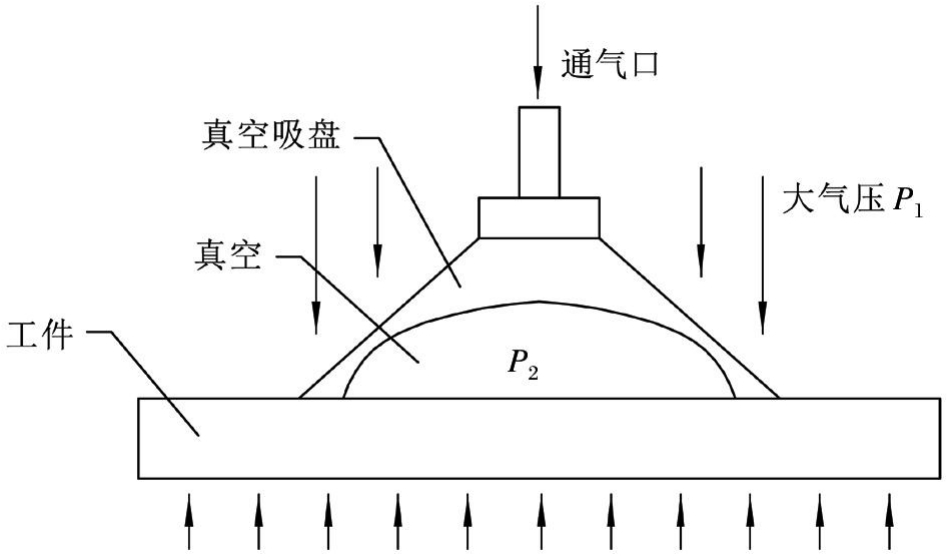
图4 真空吸盘工作原理图
真空吸盘吸附性能不仅仅受吸盘的材料品种影响,还有吸盘的结构形状与工件表面的贴合程度。比较常见的机械手真空吸盘有以下几种。
第一、扁平形状真空吸盘。这种类型的吸盘材料可以用多种材料,主要用于搬运吸附一些工件表面比较光滑的产品。
第二、短波纹管型吸盘。它的吸附性能相对来说比较好,而且缓冲性能好,对于细小工件的损坏的可能性比较小。方便吸附小型工件,同时波纹管可做较小距离的行程移动。
第三、长波纹管型吸盘。它的性能与用途场合等都与短波纹管型真空吸盘差不多,唯一比较大的区别是长波纹管型吸盘在水平方向的高度差比较大,还可以做长距离的搬运工序。

图5 吸盘种类
真空吸盘夹具的应用方案如图6和图7所示。
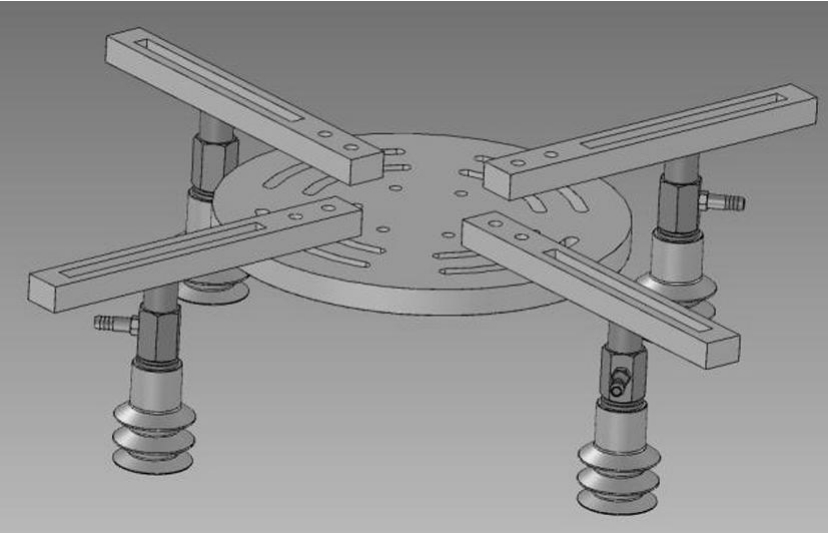
图6 真空吸盘夹具方案1
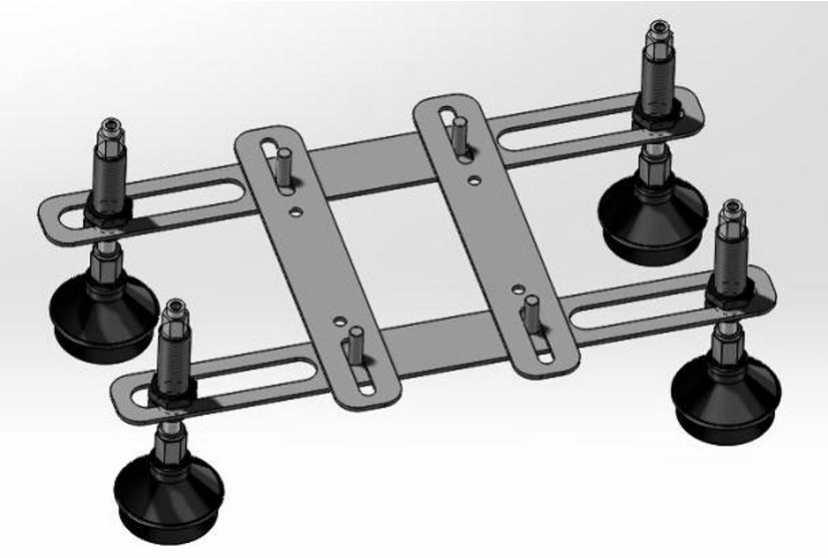
图7 真空吸盘夹具方案2
3.2 机械爪的选择
机械爪,利用气动元件与爪类零件配合工作,根据气动反应速度快的特点,可以缩短辅助生产时间,提高效率;机械爪对气动元件的精度要求不高,适合制造,气动元件的使用容易实现自动控制。气动元件以压缩空气为动力源,通过气缸将气体压力转化为机械能,完成夹具定位、夹紧等多种动作。如图8、图9所示。
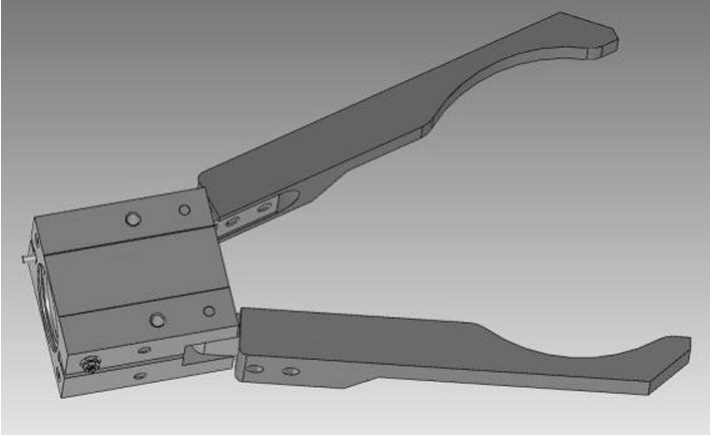
图8 机械爪夹具方案1
3.3 电磁吸盘的选择
电磁吸盘是利用了电磁原理:使内部线圈通电产生磁力,经过导磁面板,将接触在面板表面的工件紧紧吸住;线圈断电,磁力消失实现退磁,卸下工件。如图10、图11所示。

图9 机械爪夹具方案2
选用电磁吸盘进行取放料的操作时,工件必须是能受磁吸的材料,同时设计时需要分析工件的重量及吸盘的吸力及数量等。

图10 圆柱形电磁吸盘

图11 方形电磁吸盘
电磁吸盘夹具的应用方案如图12、图13所示。
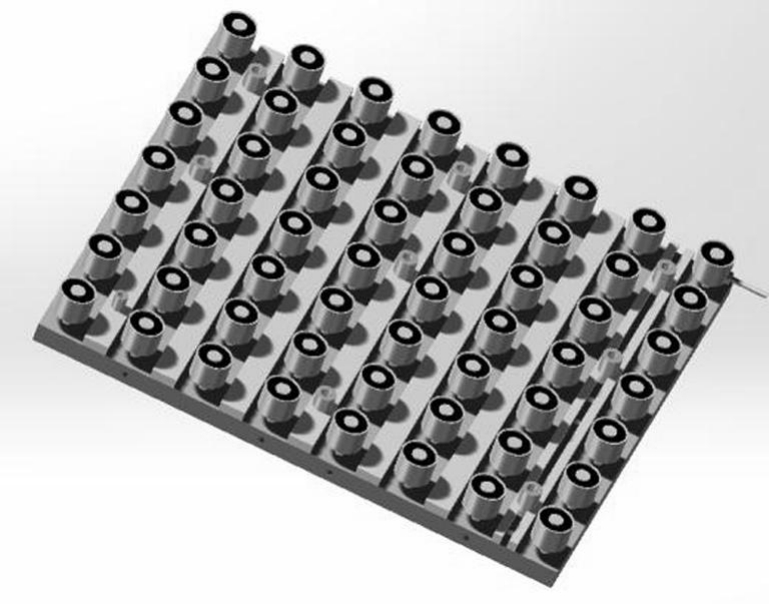
图12 电磁吸盘夹具方案1
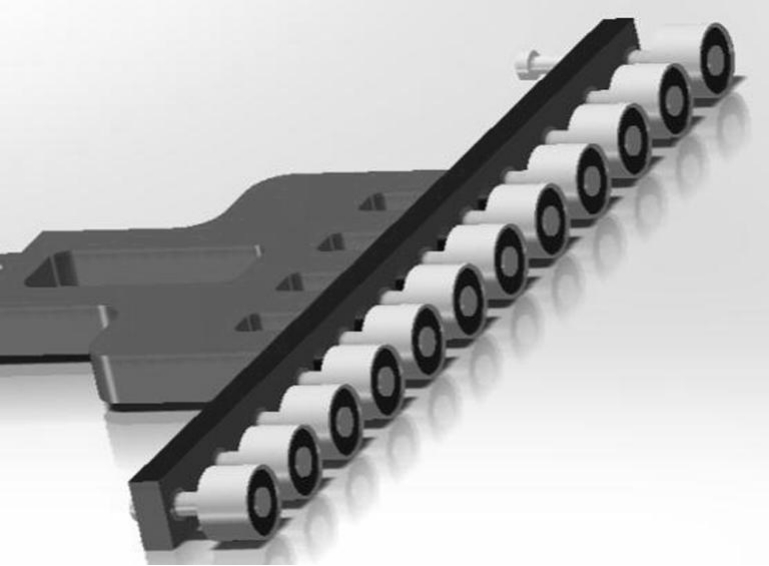
图13 电磁吸盘夹具方案2
4 结束语
通过对冲压机械手模块化技术的研究,解决了五金及金属制品行业冲压加工中手工操作效率低、劳动强度大、安全风险大等问题。采用机电一体化技术和模块化技术,对冲床机械手的端部进给模块和快速连接夹具进行了研究和开发,提高了机械手的灵活性,简化了安装和维护,提高了工作效率,降低了成本。

